主管单位:云南省科学技术协会
主办单位:《现代物业》杂志社
编辑出版:现代物业杂志社编辑部
国际标准刊号:ISSN:1671-8089
国内统一刊号:CN:53-1179/N
期刊级别:省级刊物
周 期: 旬刊
曾用刊名:现代物业.新业主;现代物业
出 版 地:云南省昆明市
语 种: 中文;
开 本: 大16开
邮发代号 :64-10
投稿邮箱 :xdwy@xdwyzzs.com
在线编辑QQ :1462791618
黄俊 曹文成 江雨
摘 要:传统吸尘器工作时需要人的参与,且操作不便。该文研发智能除尘机器人是基于单片机物联网平台之下所应用的,在借助于STM32单片机程序设计、语音识别、轨迹规划算法和WiFi远程控制,将移动机器人技术和吸尘器技术有机地融合起来, 结构灵巧, 实现了室内环境的自主清洁。该文研发的是一种环保、健康、智能型的服务机器人,具有广阔的应用前景和市场需求。
关键词:STM32单片机 除尘机器人 轨迹规划算法 智能化
中图分类号:TP242.6 文献标识码:A 文章编号:1672-3791(2021)02(a)-0025-04
Design of Intelligent Dust Removal Robot System
HUANG Jun CAO Wencheng JIANG Yu
( School of Mechanical Engineering, Changshu Institute of Technology, Suzhou, Jiangsu Province, 215500 China)
Abstract: Traditional vacuum cleaners need people to participate in their work and are inconvenient to operate. The intelligent dust removal robot developed in this paper is applied under the platform of single chip microcomputer Internet of Things. With the help of STM32 single chip microcomputer programming, speech recognition, path planning and WiFi remote control, the mobile robot technology and dust collector technology are organically integrated, and the structure is smart, thus realizing the autonomous cleaning of indoor environment. The research and development of this paper is an environment-friendly, healthy and intelligent service robot, which has broad application prospects and market demand.
Key Words: STM32 single chip microcomputer; Dust removal robot; Trajectory planning algorithm; Intelligent
近年来,人口老龄化现象的不断加剧,家居的智能性一次又一次地被提起,智能家居行业正在蓬勃发展,其中人们对于智能除尘机器人的需求也在不断增加。然而现在市面上的智能除尘机器人价格普遍较高,并不是很适合在极大范围内进行推广。该文设计的除尘机器人以STM32F103单片机为控制中心,这样一来可以最大限度地保留了它智能性的同时,也降低了生产成本,更加有利于市场推广。
1 除尘机器人设计介绍
1.1 除尘机器人总体设计
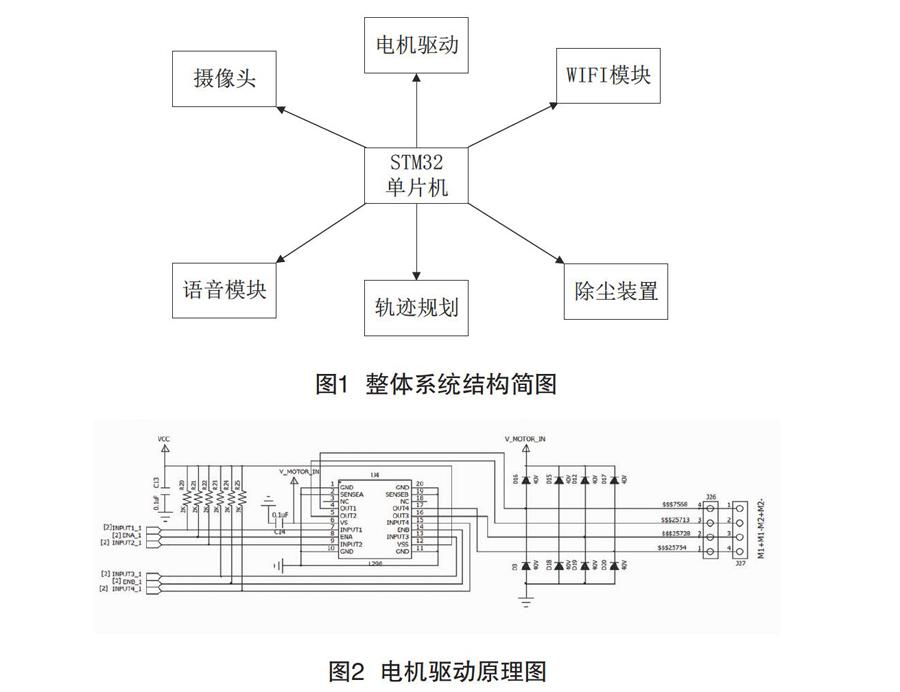
该文主要内容包括系统方案的选择、硬件电路图的设计与搭建、STM32单片机控制程序的编写等内容。该课题以STM32单片机为控制中心,运用了多种搭载超声波、红外线、吸尘、WiFi、语音等模块,加上轨迹规划等算法,实现除尘机器人的智能操控,方便人们的日常生活。整体系统结构简图具体见图1。
1.2 机械结构
在所有的机器人本体中能够良好地实现各个功能模块的通常为车体型。车体型的优点有速度快且灵活,控制操作简单。一般车体型的运动方式主要是有步行式和轮式履带式,轮式能够稳定快速地移动,能量效率高,结构简单控制简单,根据该文设计内容采用轮式比较合理,履带虽然结构十分稳定,承载能力大,但是速度慢。所以该文采用四轮式车体型在四轮的结构稳定性好,承载力大的特点基础上速度也十分快。该设计采用四轮的结构,并且采用了4个驱动轮,能够灵活地实现左转右转,做到稳定移动,车头放置红外感应器和超声波模块能流畅地避开障碍物。整体车长20cm、宽15cm,很好地契合了现代小型除尘机器人的便携以及轻巧性。将STM32单片机、电机驱动模块和WiFi模块放置于车身后半部分,将装置焊置车前底部能够很好地稳定车体型结构。
2 硬件选型
2.1 电机驱动模块
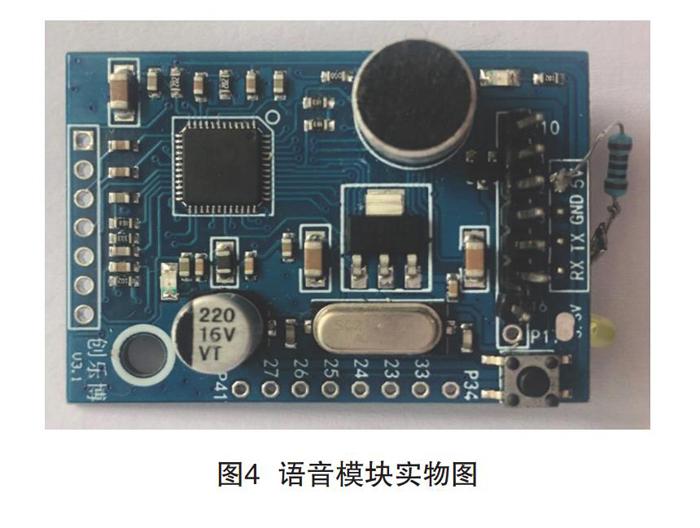
电机有直流电机和步进电机两种型号的机体,直流电机通常采用的是连续的移动模拟的控制方式,直流电机以电压为控制变量,以位置或者速度作为命令变量,直流电机需要反馈系统,以间接的方式控制电机。直流电机虽然结构较为复杂但是在速度和性能方面优良,调速方便且平滑范围大,该系统采用的是直流电动机额定电压为12V。电机驱动原理图如图2所示。
2.2 STM32F103单片机
该文的除尘机器人采用的是SYM32单片机中常用的STM32F103型号,它是属于用途非常广的32位ARM微控制器,集成了非常丰富的接口,通信模块,功能齐全,实时性比较强。它的类型实际上是一种集成电路,它的程序存储容量是64 kB且使用超大规模集成电路技术,把中央处理器、37个I/O接口、随机存储器、7个定时器、中断系统以及计数器等部件組成,组成了适用于各个场合、各种装置器件、各个场合、各类装置器件的多功能控制系统。STM32电路原理图具体见图3。
2.3 红外避障模块
红外避障模块具有一对红外线发射与接收管,对环境光线适应能力强,发射管发射出一定频率的红外线,当检测信号检测到发射面方向遇到障碍物时,红外线反射回来被接收管接收,经过比较器电路接收之后,指示灯会亮起,同时信号输出接口开始输出数字信号。传感器的有效距离范围为2~30 cm,工作电压为3.3~5V。该传感器具有干扰小、探测距离可调节、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数和黑白线循迹等众多场合。
2.4 语音模块
语音识别模块可以更加方便使用者的操作,且灵活多样。但在开始阶段语音识别模块是无法有效识别出内容来进行工作的,而是需要进行训练,收集大量的语音资料,进行数据采集和分析后,建立特定的语音识别参考模型,当人说出话语时,与库中的语音进行相似度比较,然后把相似度最高的语音作为识别的结果,最后进行输出控制。语音模块实物图如图4所示。
2.5 WiFi模块
该文采用的ESP8266是一款超低功耗的UART-WiFi透传模块,设备发起连接后,上位机能够十分迅速地进行WiFi信号识别,接收反馈信号。能够广泛用于物联网、家居设备,智能电信十分适用于该研究的除尘机器人。图5为WiFi模块电路原理图,图6为WiFi模块实物图。
3 除尘机器人整体工作流程
打开开关后,摄像头模块进行环境数据采集,找到灰尘后采用轨迹规划算法进行最优行动轨迹,随后通过WiFi模块上传至上位机。用户通过手机APP可以点击开始除尘。在路程中使用红外避障和循迹模块来躲避障碍物。此外,也可以通过语音识别模块远程开关除尘机器人进行除尘工作。除尘机器人总体工作流程图如图7所示。
4 轨迹规划算法
由于传统的Dijkstra算法虽然可以规划出更优的路线,但是由于耗时较长,不适用于该文的除尘机器人。该文采的A*算法是一种标准的静态全局轨迹寻优算法,能够极大地减少计算时间,提高行动效率。A*算法是计算所有通过环境地图中初始位置到目标位置的路线,在进行对比、选择出最优的行动方向,直到搜寻到目标位置,最后回到初始位置然后形成全局的最优轨迹的一种算法,其函数可以表示为:
f(n)=g(n)+h(n) (1)
式中,f(n)是初始节点到目标节点的估计函数;g(n)为n到目标的最短轨迹的启发值;h(n)为从当前节点n 到目标节点轨迹最优的代价估计。若启发式函数h(n)为 0时,估价函数则完全由实际代价函数g(n)来决定。相反,若不考虑实际代价,即当g(n)为0时,估计代价决定整个规划轨迹代价,此时类似于深度优先搜索算法。该文采用此算法能够更快捷、更方便地搭建除塵车对环境出发点和目标点轨迹选择,更加合理地完成除尘工作。A*算法流程图如流程图8所示。
5 结语
该文大量研究了市面上现有的除尘机器人,仔细阅读分析了相关的参数和设计原理,分析了彼此之间的优缺点,从中得出一些对我们有利的启示。该文详细地给出了基于STM32除尘机器人系统的硬件设计和软件设计,所设计的除尘机器人系统具有智能化、人性化等优点,具有广泛推广的应用价值。
参考文献
[1] 刘力玮,马振兴,张志辉,等.一种基于SLAM算法的移动机器人[J].科学技术创新,2020(27):89-90.
[2] 孙炜,吕云峰,唐宏伟,等.基于一种改进A*算法的移动机器人轨迹规划[J].湖南大学学报:自然科学版,2017,44(4):94-101.
[3] 李娜娜,张冬琴,孙淼,等.面向公共场所的智能存取装置[J].电脑知识与技术,2020,16(3):252-254.
[4] 程传奇,郝向阳,李建胜,等.融合改进A*算法和动态窗口法的全局动态轨迹规划[J].西安交通大学学报,2017,51(11):137-143.
[5] 周台新,牟令,马兴超.嵌入式清洁机器人系统设计[J].中外企业家,2018(7):96-97.
[6] 钟智杰,杨昊旋,崔鹏,等.基于STM32的智能四轮全向移动可重构避障机器人[J].传感器与微系统,2020,39(9):112-115,118.
[7] 于波,王慧.基于STM32单片机的智能消防小车系统[J].工业仪表与自动化装置,2020(4):117-121.
[8] 张志威.基于STM32嵌入式系统的电机驱动控制与可靠性分析[D].电子科技大学,2017.
[9] 徐道鸿.基于STM32的服务机器人硬件平台的设计与实现[D].东南大学,2017.
本文由: 现代物业杂志社编辑部整理发布,如需转载,请注明来源。
2021/06/10